L’article d’aujourd’hui se veut une simple présentation générale du concept de robot suiveur de ligne. Ce genre de sujet, habituellement réservé aux spécialistes d’électroniques et de mathématiques, n’est effectivement pas à la portée de n’importe quel quidam. Je n’ai pas l’intention de présenter ici un article technique sur la robotique mais une brève introduction générale sur la technologie et l’intérêt du robot suiveur de ligne.
Qu’est-ce qu’un robot suiveur de ligne ?
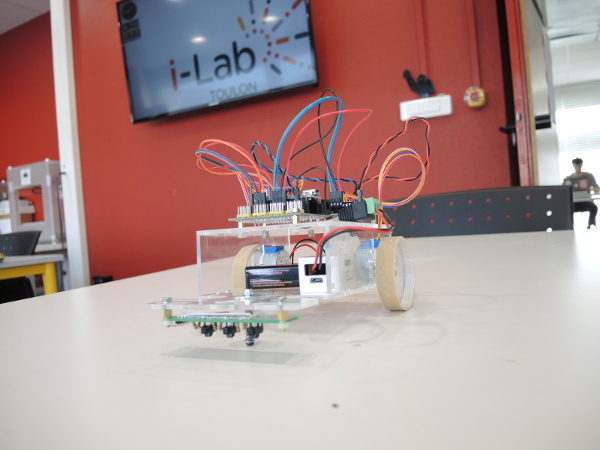
Avant d’évoquer la composition et le fonctionnement du robot suiveur de ligne, intéressons nous à l’environnement dans lequel il évolue et à son contexte opérationnel. Un robot suiveur de ligne classique ou rudimentaire évolue généralement sur un plan dépourvu de relief pour de pas s’embarrasser avec des problèmes de poussées ou de motorisation.
Un robot suiveur de ligne est donc un robot fabriqué principalement pour effectuer deux fonctions, le déplacement et la reconnaissance visuelle. Fabriqué par des amateurs ou des professionnels, la fonction de reconnaissance est une fonction absolument indispensable pour le développement de tout robot intelligent. Le robot suiveur de ligne comme son nom l’indique évolue sur un plan où est dessiné une ligne dédiée à la reconnaissance optique.
La ligne comme chacun le sait est une suite de points, elle doit être suffisamment large pour être visible par l’appareil optique du robot. Une dizaine de centimètre de largeur est conseillé selon la puissance de la précision de l’œil optique. Un robot équipé d’un ou de deux yeux électroniques doit pouvoir détecter la ligne présente au sol ou identifier toute discontinuité dans le jeu du parcours (obstacles, fin de ligne etc.) . Il est conseillé de tracé une ligne bien visible (noir sur fond blanc ou inversement, avec scotch ou peinture) pour faciliter la reconnaissance optique du robot suiveur de ligne.
De quoi est fait un robot suiveur de ligne ?
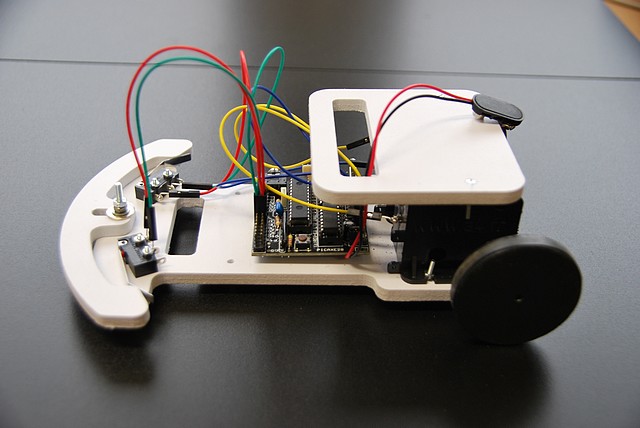
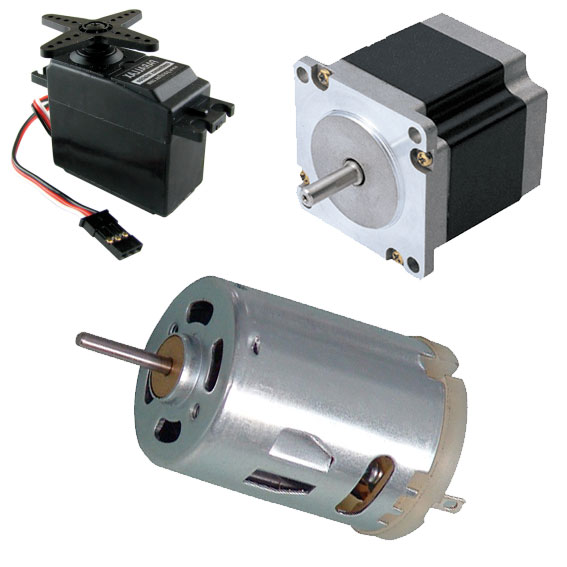
Un robot suiveur de ligne digne de ce nom dispose de plusieurs équipements essentiels. Tout d’abord la motorisation, car il faut bien que notre petit engin se déplace tout même. Un moteur électrique est nécessaire pour actionner les roues de votre engin. Nous vous conseillons des kit robotiques de roues et de moteurs déjà préparés pour ce type de déplacement. Au passage, un moteur électrique peut assurer plusieurs type de mouvement si vous ne désirez pas installer des roues sur votre robot. Il existe plusieurs types de moteurs (DC continu, R/C servo, Stepper). Une motorisation DC continu convient très bien pour votre premier essai de robot suiveur de ligne ; une centaine d’euros sera nécessaire pour du matériel fiable et adapté mais vous pouvez trouver des kits à moins de 100 euros de marque Arduino. Certains kits fournissent en plus du moteur un châssis pour supporter l’ensemble de la motorisation. Les moteurs installés assurent ainsi la propulsion.
Un moteur performant doit pouvoir réagir en cas de présence d’un obstacle, s’arrêter, faire demi-tour ou encore reprendre la piste si son programme le permet.
Un microcontrôleur ou microprocesseur, un élément indispensable
Un robot qui suit une ligne doit disposer d’un micro-contrôleur, un ordinateur monté sur circuit intégré. Directement implanté sur une puce de silicium de quelques millimètres carrés, la structure interne du microprocesseur se divise en trois parties :
- Les mémoires, comme toutes les mémoires, elles sont destinées à stocker le programme développé.
- Le processeur, qui est le cœur du système, il est dévolu au calcul et à l’interprétation des instructions du programme pendant son exécution.
- Les périphériques connectés au processeur
Le capteur de ligne
Nous avons évoquer rapidement les éléments essentiels de la motorisation, mais votre robot suiveur de ligne ne serait qu’une vulgaire voiture télécommandée si on ne lui ajoutait pas des yeux,et notamment des capteurs optiques ! Le capteur est équipé d’un potentiomètre, celui-ci produit une tension en fonction de l’angle de l’axe de sortie, il permet d’interpréter la tension selon son degré de variabilité. Chaque capteur optique ou œil électronique est pourvu généralement d’un capteur infrarouge. Naturellement, le capteur est situé au nez de notre appareil c’est la reconnaissance du bolide s’effectue vers l’avant, n’oublions pas qu’il ne s’agit que d’un petit véhicule motorisé et non d’une voiture dernier cris !
Ces capteurs optiques sont dédiés à la détection de la ligne continue disposé à cet effet. Les capteurs optiques ont pour fonction d’interpréter la quantité de photons dans sa ligne de visée grâce à un phototransistor sensible à l’émission de photons, capable de réagir à la lumière et de calculer la longueur d’onde.
Direction pour robot suiveur de ligne
Le moteur électrique sert également à la direction du robot. Il existe des servomoteurs très utilisé dans le domaine de la petite robotique.Le servomoteur est un dispositif essentiel pour un robot suiveur de ligne, il est couramment utilisé pour diriger votre véhicule à distance à l’aide d’une télécommande ou d’un contrôleur à distance qui peut être munie d’une caméra de contrôle. Largement répandu chez les férus de modélisme, les servomoteurs se composent d’un petit moteur électrique et généralement d’un réducteur de sortie pour une plus grande puissance de couple et ainsi maîtriser mieux sa vitesse. Si votre bourse vous le permet n’hésitez pas à faire l’acquisition d’un moteur réputé fiable et d’une électronique de contrôle qui a fait ses preuves (Arduino)…Nous vous invitons à consulter les nombreux forum amateur de robotique en particulier sur le sujet des robots suiveur de ligne.
Faire obéir un robot suiveur de ligne
Un concept essentiel à l’obéissance de votre robot suiveur de ligne est le concept d’asservissement. L’asservissement est le moyen par lequel vous pouvez envoyer ordre au moteur de votre robot suiveur de ligne afin d’enclencher son action ou son arrêt. L’asservissement de position correctement paramétré évite à votre robot une perte de trajectoire ou de bien comprendre les actions demandées. Une mauvaise réponse de la part du robot vous indique immédiatement une erreur de programmation de votre système d’asservissement et peut le faire sortir de votre tracé sur votre ligne.
Il existe plusieurs niveau d’asservissement :
- l’asservissement de vitesse, qui contrôle la puissance générale du moteur
- l’asservissement de position, qui contrôle la direction
- l’asservissement d’accélération, qui contrôle la vitesse du couple
L’asservissement permet ainsi d’améliorer les performances d’ensemble de votre système de contrôle, soit un meilleur contrôle du rapport entre l’énergie (batterie) et les ressources déployés au niveau de la motorisation. Mettre en place un système d’asservissement de votre robot suiveur de ligne vous permet d’assurer la stabilité de votre engin et ainsi réguler la totalité de votre système pour anticiper toute perturbation sur votre parcours en ligne.
Les robots suiveurs de ligne sont couramment présent dans les tournois, ou concours de robots (concours lepine par exemple). Ils constituent une première bonne approche de la robotique, il vous faut tout de même quelques notions d’informatique et s’armer d’un peu de patience, il faut parfois compter plusieurs mois pour développer un robot suiveur de ligne qui tient la route !
